UNIDAD EDUCATIVA PARTICULAR "POLITÉCNICO"
4° AÑO PAI - 10° AÑO DE BÁSICA "A"
INDIVIDUAL - Motor reductor
Nombre: Christopher Acosta Fecha: 24/10/17
Contestar en el blog las preguntas 3 y 4 del moodle.
3. En base a lo observado, infiera acerca de la función del código.
La línea const int control = 9 ; indica en que pin está conectado el transitor (como la constante "control") a la placa Arduino. Este transitor amplificará el voltaje que recibirán el led y el motor reductor.
El siguiente void setup indica que el Arduino enviará señal a la constante "control" a través de uno de sus pines, por eso es OUTPUT:
void setup()
{ pinMode(control, OUTPUT) ; }
El void loop demuestra el rango del voltaje (o velocidad para el motor) que emitirá el transitor que será desde 0 hasta menos de 255 y luego vuelva a ser 0. Además, el analogWrite será la orden para enviar señal a "control" y éste se demorará 15 milisegundos en leerla.
void loop()
{
for ( int n = 0 ; n < 255 ; n++)
{
analogWrite (control, n) ;
delay(15) ;
}
}
4. ¿Para qué sirve el transistor NPN?
El transistor NPN sirve como amplificador de voltaje.
El transistor NPN sirve como amplificador de voltaje.
5. Conecte el teclado para que al presionar A, B o C se pueda controlar diferentes velocidades.
Esta imagen indica la conexión física de los elementos electrónicos incluyendo un transistor. El cable de señal será conectado en el pin 13 del Arduino:
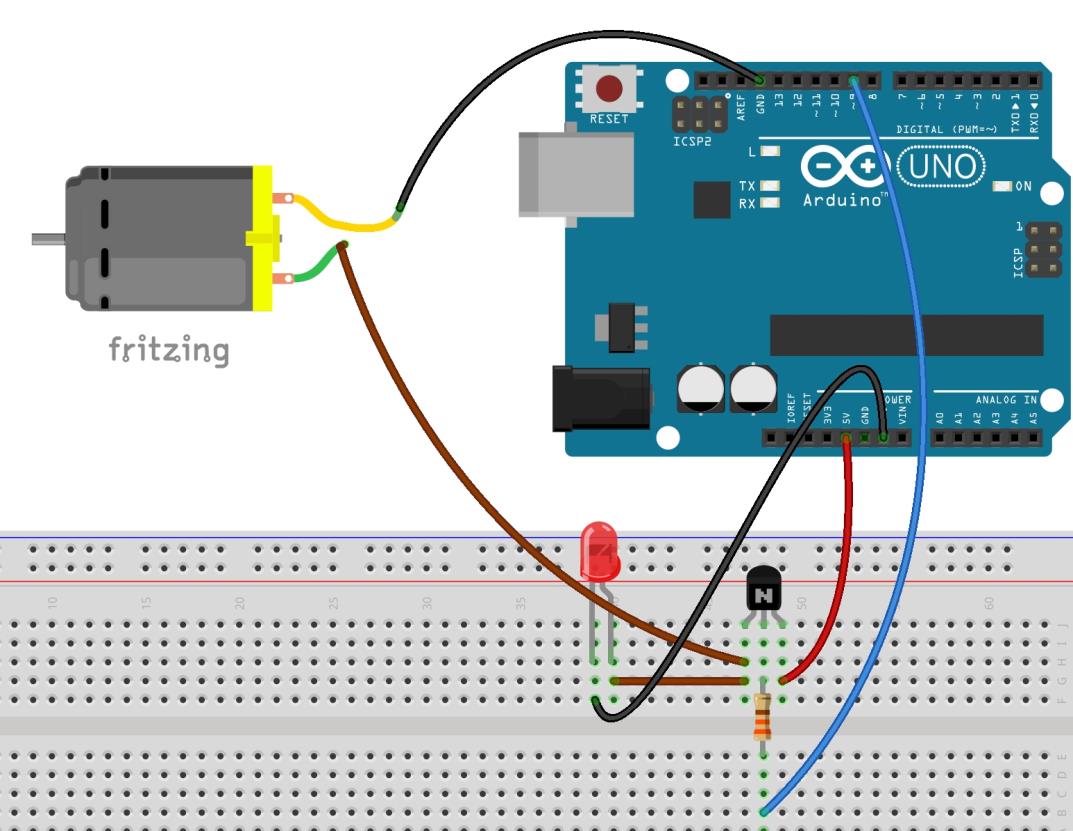


Esta imagen indica la conexión física de los elementos electrónicos incluyendo un transistor. El cable de señal será conectado en el pin 13 del Arduino:
Luego, conectamos el Teclado Arduino en los pines 2 al 9 del Arduino.
Ahora en la programación, se debe incluir la librería Keypad, indicar el pin en que está conectado el transistor. Después, se le dará la variable "n" y luego se escribe el programa del Teclado, indicando en qué pines está conectado. En void setup se pondrá Serial.begin(9600); y pinMode(control,OUTPUT);

Por otro lado en void loop, se pondrá el if para indicar las condiciones.cuando "pulsación" sea A, el motor vaya a una velocidad. Si es B, irá a otra y lo mismo con C. Se ejecuta la acción con analogWrite(control, n); (ver la siguiente imagen)

Este es un video del motor en movimiento. Lamentablemente en mi motor no se puede apreciar un cambio de velocidad.





